Research Papers
Smart Machine and Assistive Robotics Technology Lab, with Dr. Byung-Cheol Min
†: Equal Contribution; ‡: Corresponding Author
Journal Papers
[J2: IEEE RA-L] Initial Task Allocation in Multi-Human Multi-Robot Teams: An Attention-enhanced Hierarchical Reinforcement Learning Approach
Ruiqi Wang†‡, Dezhong Zhao†, Arjun Gupte, and Byung-Cheol Min‡.
IEEE Robotics and Automation Letters (RA-L), vol. 9, no. 4, pp. 3451-3458, April 2024.[J1: IEEE T-CDS] Husformer: A Multimodal Transformer for Multimodal Human State Recognition
Ruiqi Wang†, Wonse Jo†, Dezhong Zhao, Weizheng Wang, Arjun Gupte, Baijian Yang, Guohua Chen, and Byung-Cheol Min.
IEEE Transactions on Cognitive and Developmental Systems (T-CDS), vol. 16, no. 4, pp. 1374-1390, August 2024.
Pre-Prints/Under Review
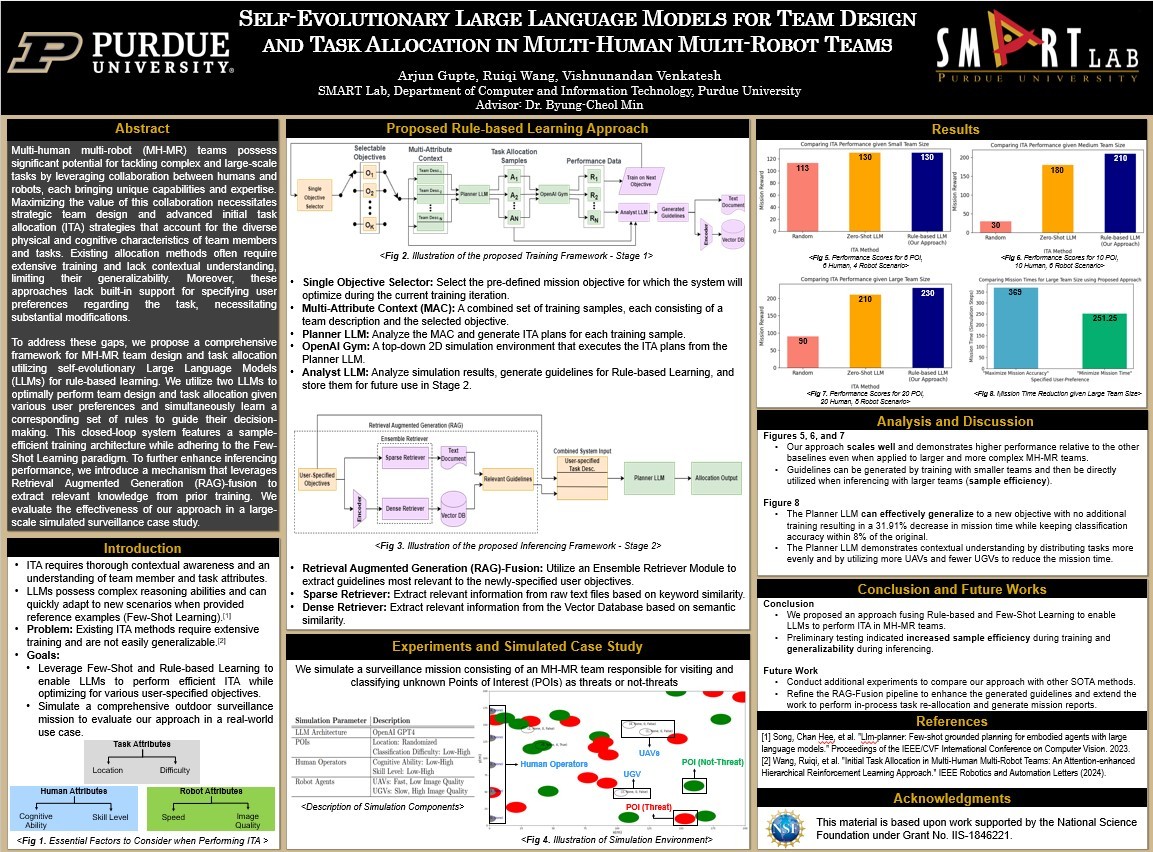
[P1: 2026 IEEE ICRA] REBEL: Rule-based and Experience-enhanced LLMs for Initial Task Allocation in Multi-Human Multi-Robot Teams
Arjun Gupte†‡, Ruiqi Wang†, Ziqin Yuan, L. N. Vishnunandan Venkatesh, Taehyeon Kim, Dezhong Zhao, and Byung-Cheol Min‡.
IEEE International Conference on Robotics and Automation (ICRA), Vienna, Austria, 1-5 June, 2026., Under Review.
Research Talks and Poster Presentations
Delivered at various Purdue Research Conferences